Introduction
Hello. I have recently been spending a lot of time dithering. In image processing, dithering is the act of applying intentional perturbations or noise in order to compensate for the information lost during colour reduction, also known as quantisation. In particular, I’ve become very interested in a specific type of dithering and its application to colour palettes of arbitrary or irregular colour distributions. Before going into detail however, let’s briefly review the basics of image dithering.
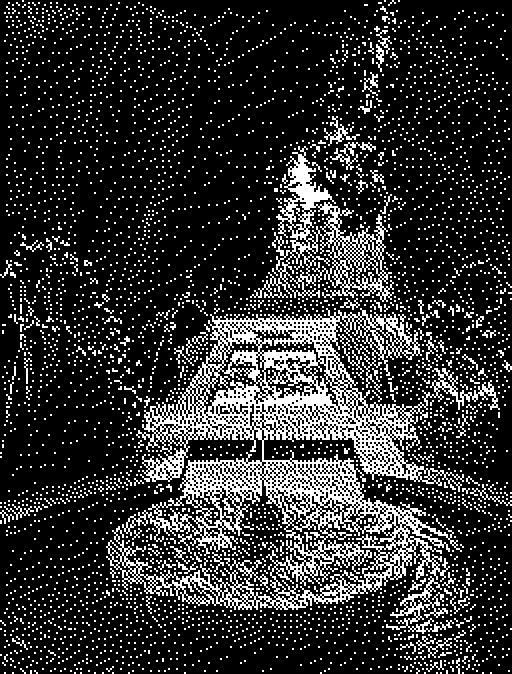
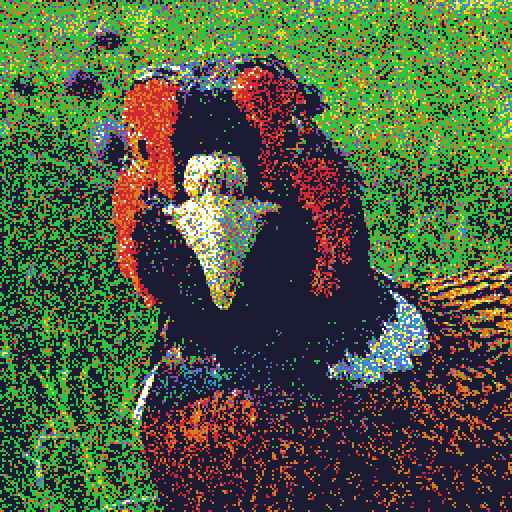
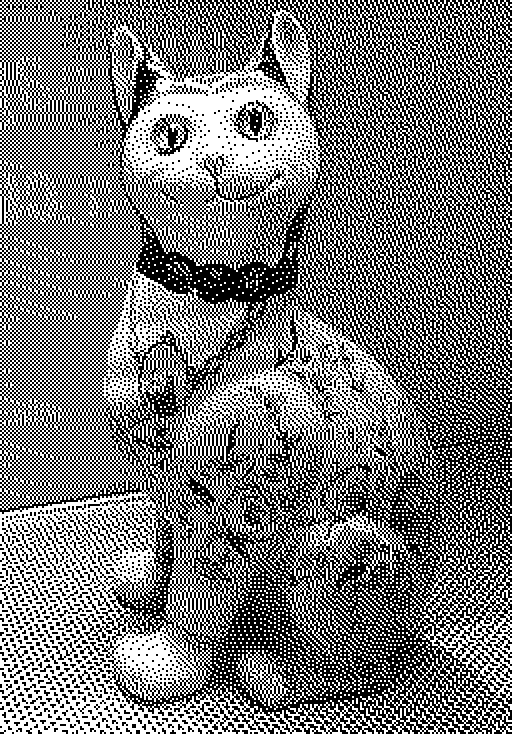
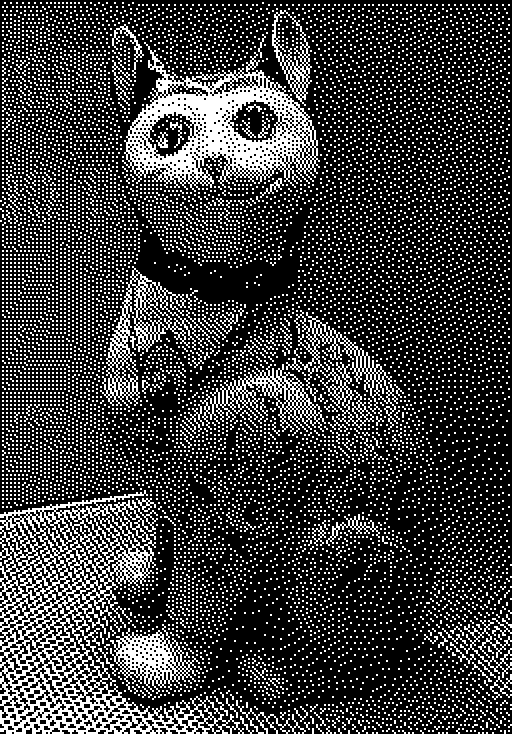
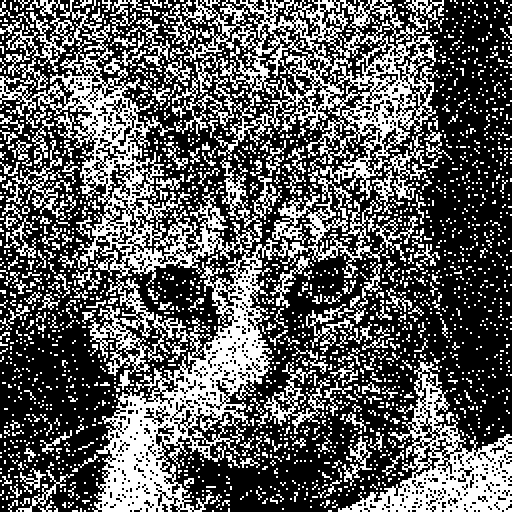
Dithering in its simplest form can be understood by observing what happens when we quantise an image with and without modifying the source by random perturbation. In the examples below, a gradient of 256 grey levels is quantised to just black and white. Note how the dithered gradient is able to simulate a smooth transition from start to end.



While this is immediately effective, the random perturbations introduce a disturbing texture that can obfuscate details in the original image. To counter this, we can make some smart choices on where and by how much to perturb our input image in an attempt to add some structure to our dither and preserve some of the lost detail.
Ordered Dithering
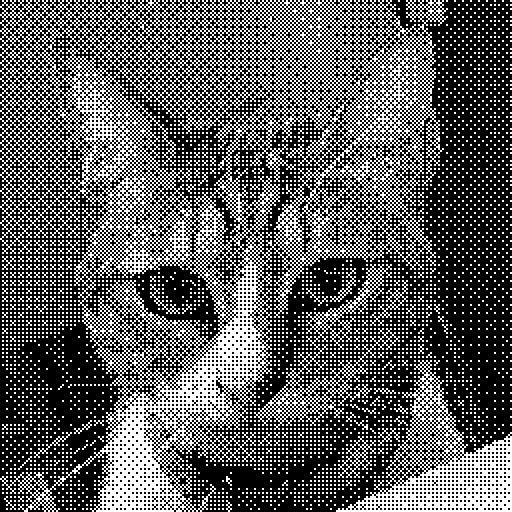
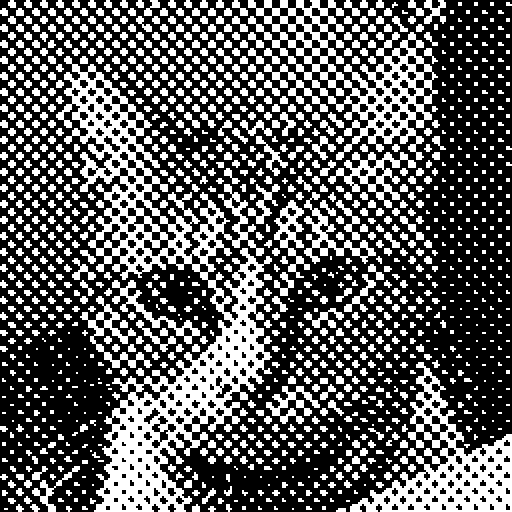
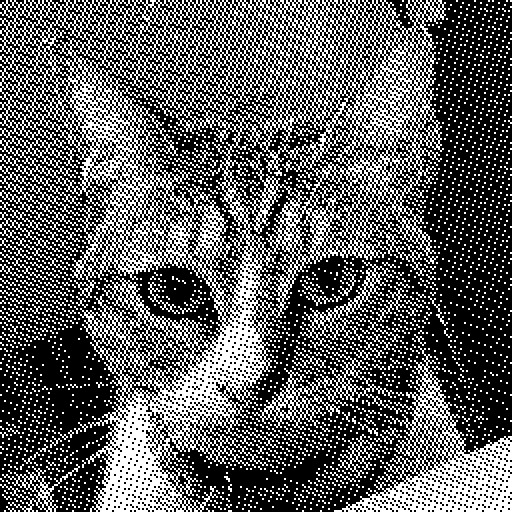
Instead of perturbing each pixel in the input image at random, we can choose to dither by a predetermined amount depending on the pixel’s position in the image. This can be achieved using a threshold map; a small, fixed-size matrix 







We can see that the threshold map distributes perturbations more optimally than purely random noise, resulting in a clearer and more detailed final image. The algorithm itself is extremely simple and trivially parallelisable, requiring only a few operations per pixel.
Error-Diffusion Dithering
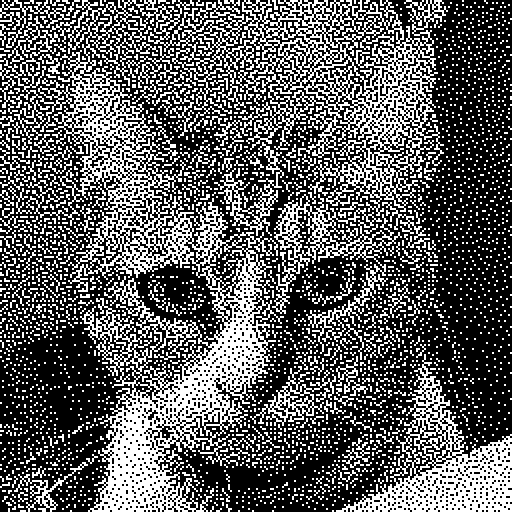
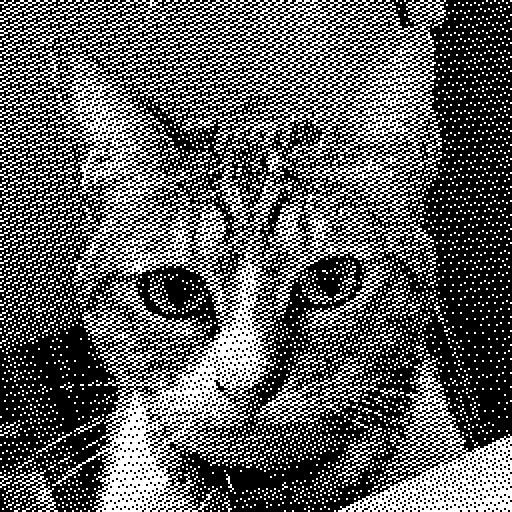
Another way to approach dithering is to analyse the input image in order to make informed decisions about how best to perturb pixel values prior to quantisation. Error-diffusion dithering does this by sequentially taking the quantisation error for the current pixel (the difference between the input value and the quantised value) and distributing it to surrounding pixels in variable proportions according to a diffusion kernel 


Due to this more measured approach, error-diffusion dithering is even better at preserving details and can produce a more organic looking final image. However, the algorithm itself is inherently serial and not easily parallelised. Additionally, the propagation of error can cause small discrepancies in one part of the image to cascade into other distant areas. This is very obvious during animation, where pixels will appear to jitter between frames. It also makes files harder to compress.
Palette Quantisation
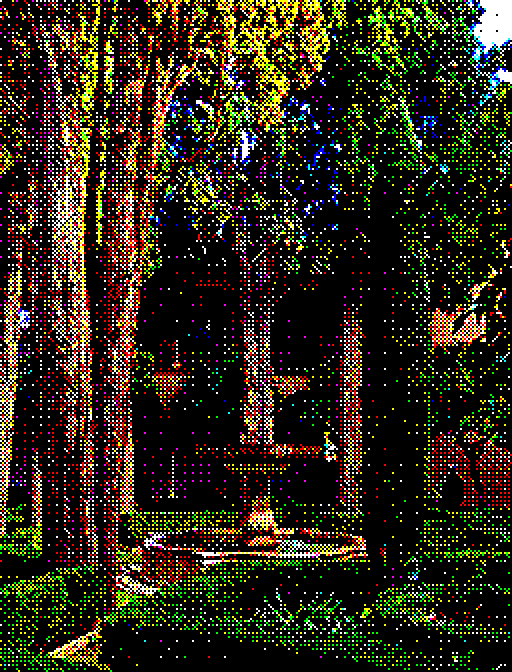
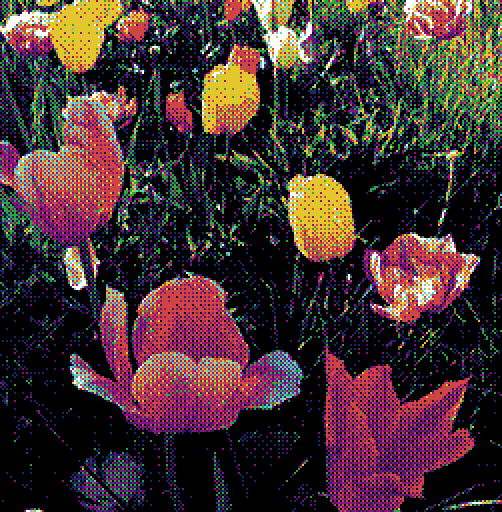
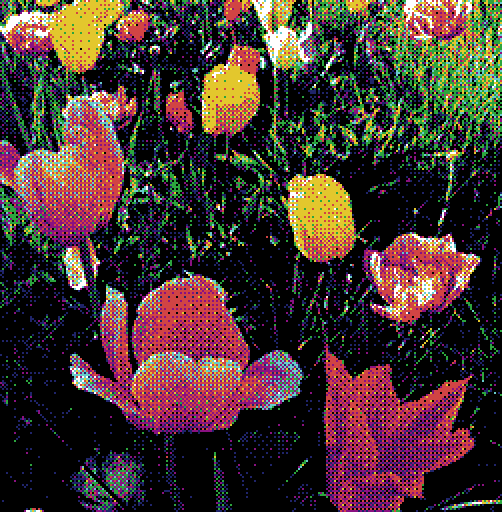
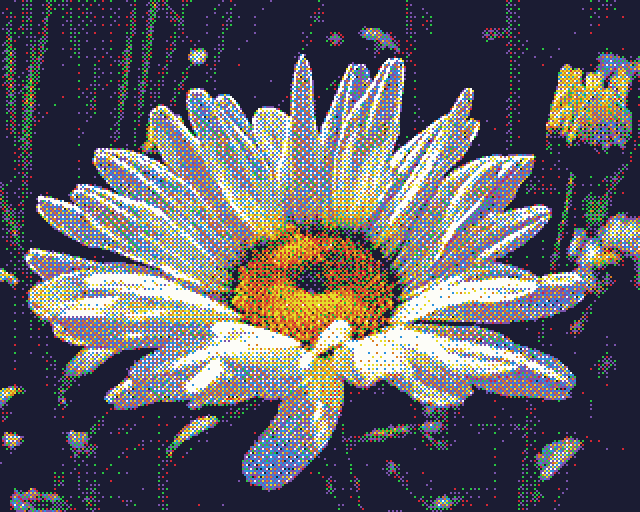
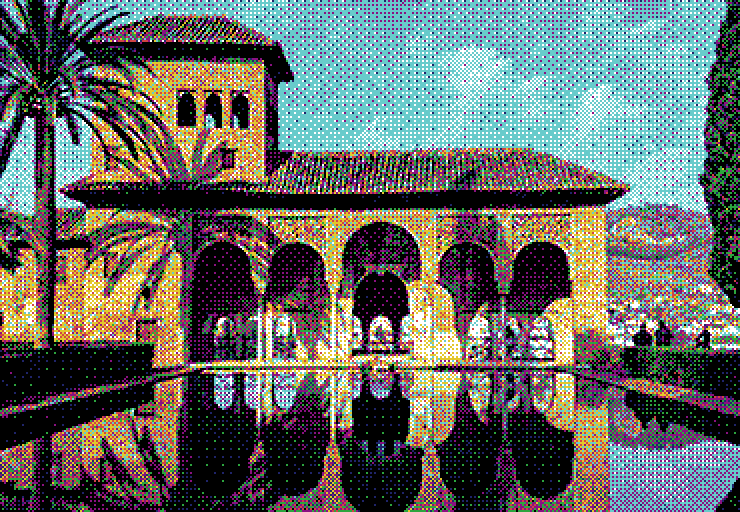
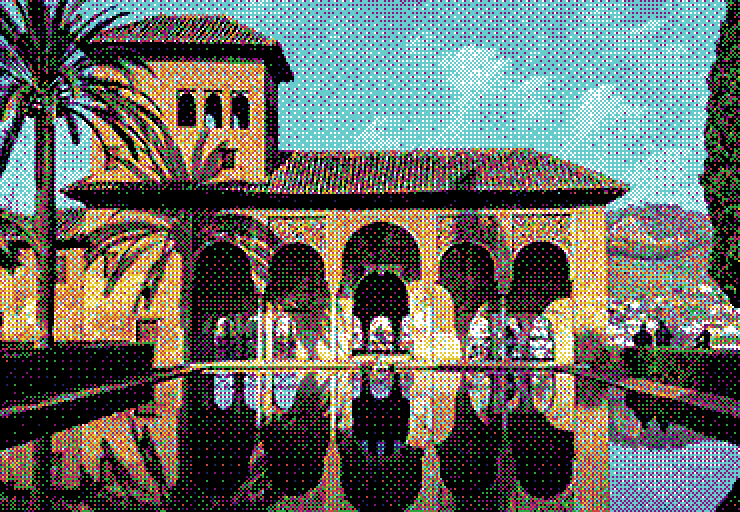
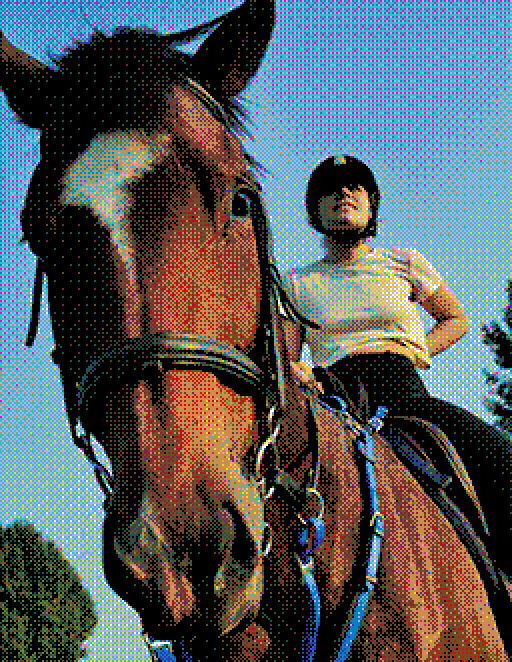
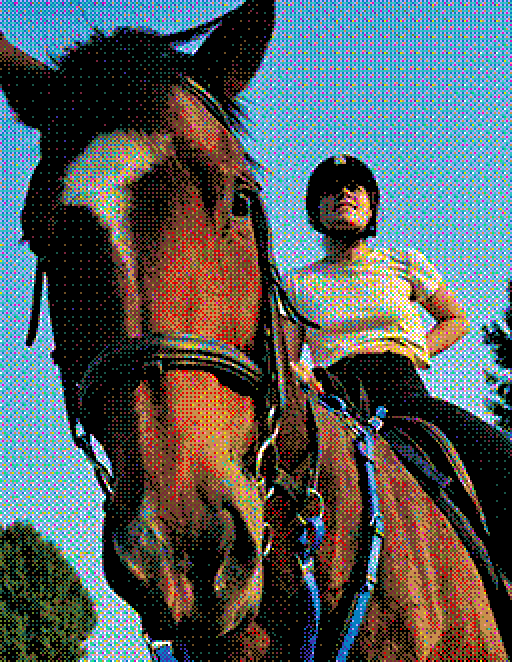
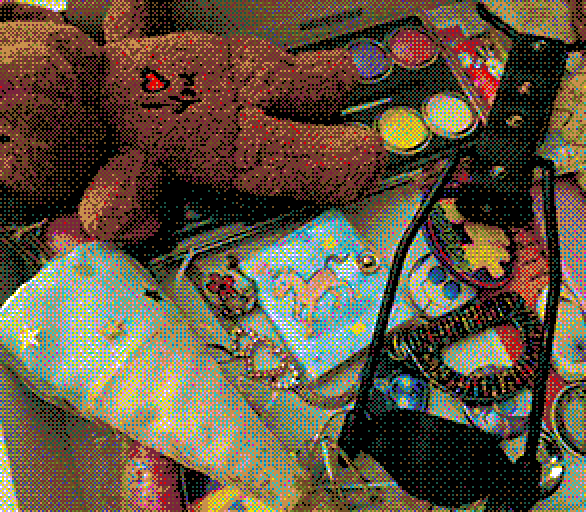
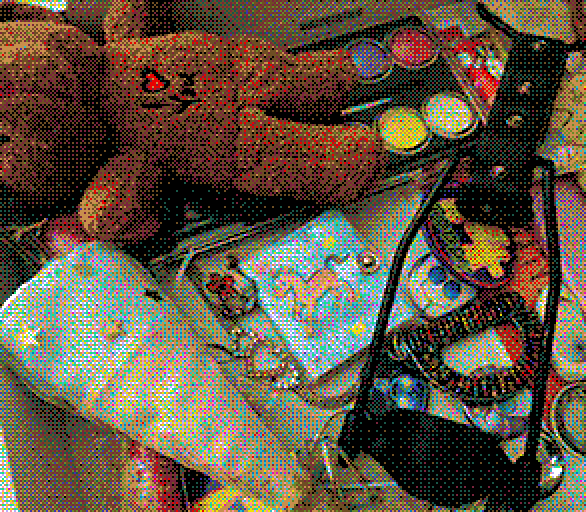
Moving beyond just black and white towards full-colour variable palettes presents another set of problems. Taking the methods presented above and quantising an image using an arbitrary colour palette reveals that error-diffusion is also better at preserving colour information when compared to ordered dithering.



Intuitively, it’s not too difficult to understand why this is the case. Remember that error-diffusion works in response to the relationship between the input value and the quantised value. In other words, the colour palette is already factored in during the dithering process. On the other hand, ordered dithering is completely agnostic to the colour palette being used. Images are perturbed the same way every time, regardless of the given palette.
Regular vs Irregular Palettes
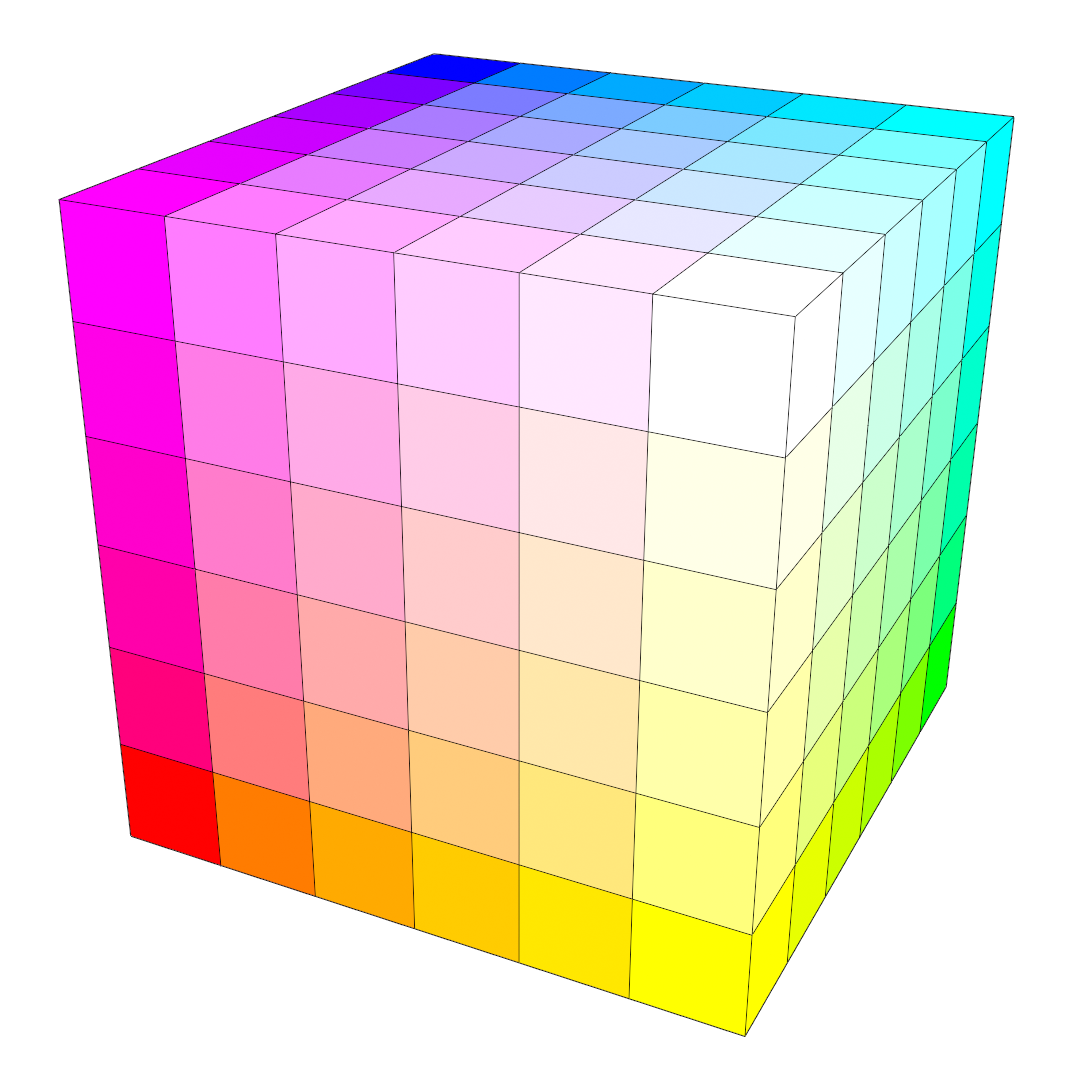
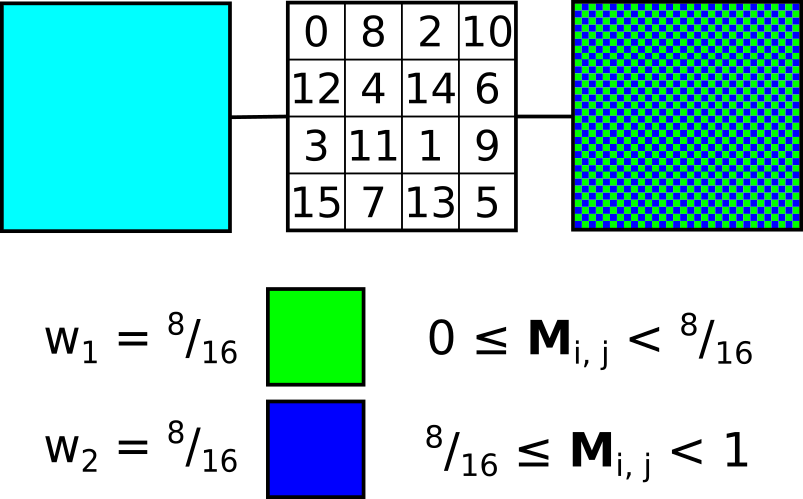
Under certain circumstances, it’s possible to modify ordered dithering so that it can better handle colour information. This requires that we use a palette that is regularly distributed in colour space. A regular palette is composed of all possible combinations of red, green and blue tristimulus values, where each colour component is partitioned into a number of equally spaced levels. For example, 6 levels of red, green and blue totals 6³ = 216 unique colours, equivalent to the common web-safe palette.
This time, before we perturb the input image, we take the value given by the threshold matrix and divide it by 

The whole algorithm can be expressed in psuedocode like so:
for each pixel in image
let value = value in threshold matrix at (x, y)
let offset = pixel + (value - 0.5) * (1.0 / number of levels)
set pixel as closest colour to offset
By appropriately scaling the perturbation amount for each colour channel separately, we can also extend this to work with palettes where
The Probability Matrix
Another way to look at our threshold matrix is as a kind of probability matrix. Instead of offsetting the input pixel by the value given in the threshold matrix, we can instead use the value to sample from the cumulative probability of 




 for a given pixel is compared against the cumulative probability of each candidate.
for a given pixel is compared against the cumulative probability of each candidate.This approach shares a lot in common with the idea of multivariate interpolation over scattered data. Multivariate interpolation attempts to estimate values at unknown points within an existing data set and is often used in fields such as geostatistics or for geophysical analysis like elevation modelling. We can think of our colour palette as the set of variables we want to interpolate from, and our input colour as the unknown we’re trying to estimate. We can borrow some ideas from multivariate interpolation to develop more effective dithering algorithms.
N-Closest Algorithm
The N-closest or N-best dithering algorithm is a straightforward solution to the N-candidate problem. As the name suggests, the set of candidates is given by the
for each pixel in image
let sum of weights = 0.0
let list of candidates = N closest colours to pixel
for each candidate in list of candidates
candidate.weight = 1.0 / distance to candidate
sum of weights += candidate.weight
for each candidate in list of candidates
candidate.weight /= sum of weights
let seed = value in threshold matrix at (x, y)
let sum = 0.0
for each candidate in list of candidates
sum += candidate.weight
if seed < sum
set pixel as candidate
process next pixelOne by-product of weighing the candidates by their distance is that the resulting output image is prone to false contours or banding. Increasing



 .
.Note that IDW often includes a variable exponent 



As you might expect, the result of this is that colours which lie closer to the input pixel are given a greater proportion of the total influence with ever-increasing values of
N-Convex Algorithm
Instead of taking the
for each pixel in image
let goal = pixel
do n times
candidate[n] = closest colour to goal
mark candidate[n] as used
goal += pixel - candidate[n]If this sounds familiar to you, it’s because this method works very similarly to error-diffusion. Instead of letting adjacent pixels compensate for the error, we’re letting each successive candidate compensate for the combined error of all previous candidates.
 . Left to right: N-closest, N-convex.
. Left to right: N-closest, N-convex.Like the N-closest algorithm, the weight of each candidate is given by the inverse of its distance to the input colour. Because of this, both algorithms produce output of a similar quality, although the N-convex method is measurably faster. As with the last algorithm, more details can be found in the original paper[2].
The Linear Combination
If we think about this algebraically, what we really want to do is express the input pixel

Note however that depending on 

As it stands, inverse distance weighting is not very good at minimising this error. Another approach is needed if we want to improve the image quality.
Thomas Knoll’s Algorithm
Like the N-convex algorithm, this algorithm attempts to find a set of candidates whose centroid is close to
for each pixel in image
let goal = pixel
do n times
candidate[n] = closest colour to goal
goal += pixel - candidate[n]
let seed = random integer from 0 to n
set pixel as candidate[seed]This algorithm attempts to minimise

 ).
).Barycentric Coordinates
Another way to approach the linear combination is to look at it geometrically. This is where the idea of barycentric coordinates can help. A barycentric coordinate system describes the location of a point as the weighted sum of the regular coordinates of the vertices forming a simplex. In other words, it describes a linear combination with respect to a set of 

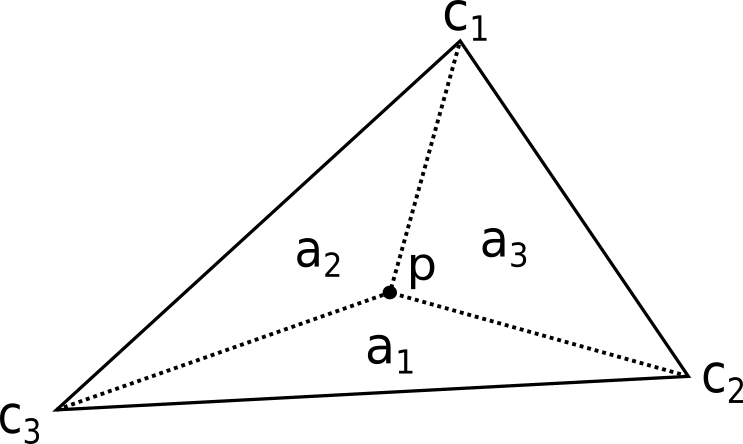
 are derived from the areas of sub-triangles
are derived from the areas of sub-triangles  .
.The weight of each term is given by the proportion of each sub-triangle area 


Knowing this, we can modify the N-Convex algorithm covered earlier such that the candidate weights are given by the barycentric coordinates of the input pixel after being projected onto a triangle whose vertices are given by three surrounding colours, abandoning the IDW method altogether1. This results in a fast and exact minimisation of 
Triangulated Irregular Network
Recall that a barycentric coordinate system is given with respect to a
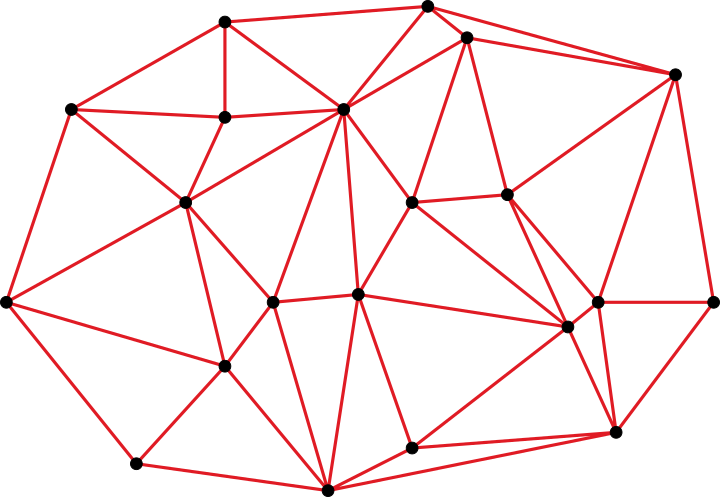
While there exist many possible ways to triangulate a set of points, the most common method for TINs is the Delaunay triangulation. This is because Delaunay triangulations tend to produce more regular tessellations that are better suited to interpolation. In theory, we can represent our colour palette as a TIN by computing the 3D Delaunay triangulation of the colours in colour space. The nice thing about this is that it makes finding an enclosing simplex much faster; the candidate selection process is simply a matter of determining the enclosing tetrahedron of an input point within the network using a walking algorithm, and taking the barycentric coordinates as the weights.



If executed well, Delaunay-based tetrahedral dithering can outperform the N-convex method and produce results that rival Knoll’s algorithm. The devil is in the detail however, as actually implementing a robust Delaunay triangulator is a non-trivial task, especially where numerical stability is concerned. The additional memory overhead required by the triangulation structure may also be a concern.
Natural Neighbour Interpolation
We’ve looked at how we can geometrically find the linear combination using barycentric coordinates, but it is not the only way to do so. Natural neighbour interpolation works by observing what happens when an input point is inserted into a set of points represented by a Voronoi diagram. The Voronoi diagram is simply a partition of space into polygonal regions for each data point, such that any point inside a given region is proximal to its corresponding data point.
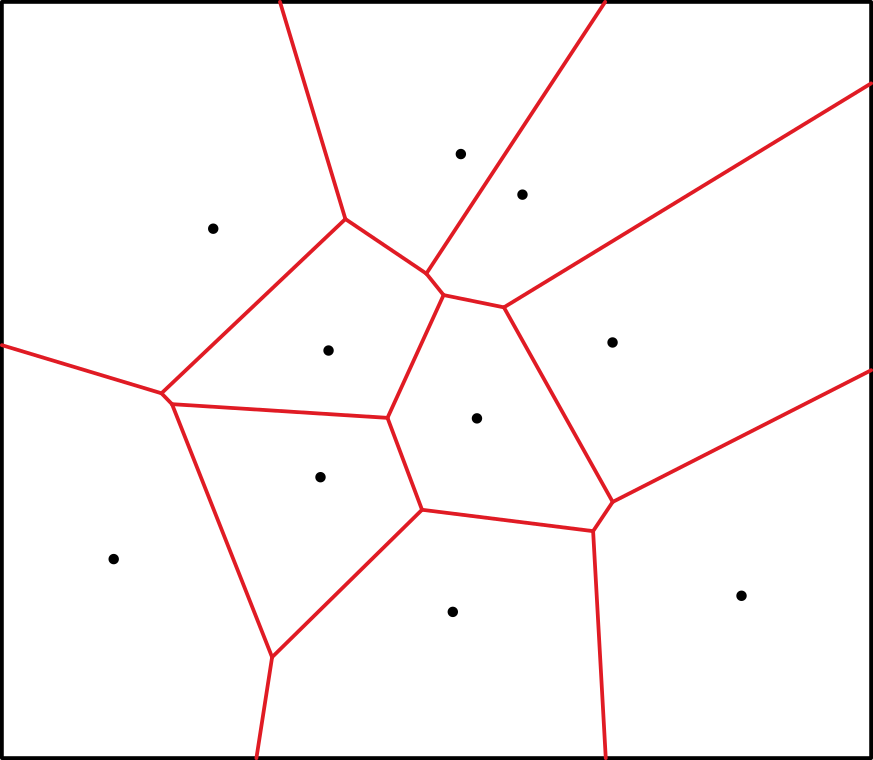
When another data point is inserted and the Voronoi diagram reconstructed, the newly created region displaces the area that once belonged to the old regions. Those points whose regions were displaced are considered natural neighbours to the new point. The weight of each natural neighbour is given by the area 

 creates a new Voronoi region shown in blue, displacing some of the old regions. The weight of each natural neighbour
creates a new Voronoi region shown in blue, displacing some of the old regions. The weight of each natural neighbour  is derived from the area of the displaced region
is derived from the area of the displaced region  .
.Natural neighbour interpolation has a number of strengths over linear barycentric interpolation. Namely, it provides a smooth or continuous slope between samples3, and is always the same for a given point set, unlike the TIN where the quality of the triangulation can produce biases in the outcome, even in the best case.
Implementing natural neighbour interpolation implies the construction of a geometric Voronoi diagram, however this is not strictly the case. Since the Delaunay triangulation is the dual graph of the Voronoi diagram, all the information needed to perform natural neighbour interpolation is already implicit within the triangulation itself. Algorithms to determine natural neighbours from the Delaunay triangulation can be found in several papers within the literature[4][5]. Unfortunately the relative complexity of natural neighbour interpolation means that it is slower than barycentric interpolation by a considerable margin.
Joel Yliluoma’s Algorithms
A notable resource on the topic of ordered dithering using arbitrary palettes is Joel Yliluoma’s Arbitrary-Palette Positional Dithering Algorithm. One key difference of Yliluoma’s approach is in the use of error metrics beyond the minimisation of
Yliluoma’s algorithms can produce very good results, with some variants matching or even exceeding that of Knoll’s. They are generally slower however, except in a few cases.
Tetrapal: A Palette Triangulator
Most of the algorithms described here are quite straightforward to implement. Some of them can be written in just a few lines of code, and those that require a bit more effort can be better understood by reading through the relevant papers and links I have provided. The exception to this are those that rely on the Delaunay triangulation to work. Robust Delaunay triangulations in 3D are fairly complex and there isn’t any publicly available software that I’m aware of that leverages them for dithering in the way I’ve described.
To this end, I have written a small C library for the sole purpose of generating the Delaunay triangulation of a colour palette and using the resulting structure to perform barycentric interpolation as well as natural neighbour interpolation for use in colour image dithering. The library and source code is available for free on Github. I’ve included an additional write up that goes into a bit more detail on the implementation and also provides some performance and quality comparisons against other algorithms. Support would be greatly appreciated!
Appendix I: Candidate Sorting
When using the probability matrix to pick from the candidate set, it is important that the candidate array be sorted in advance. Not doing so will fail to preserve the patterns distinctive of ordered dithering. A good approach is to sort the candidate colours by luminance, or the measure of a colour’s lightness4. When this is done, we effectively minimise the contrast between successive candidates in the array, making it easier to observe the pattern embedded the matrix.

If the number of candidates for each pixel grows too large (as is common in algorithms such as Knoll and Yliluoma) then sorting the candidate list for every pixel can have a significant impact on performance. A solution is to instead sort the palette in advance and keep a separate tally of weights for every palette colour. The weights can then be accumulated by iterating linearly through the tally of sorted colours.
sort palette by luminance
let weights[palette size] = weight for each colour
...
for i in range 0 to palette size - 1
cumulative weight += weights[i]
if cumulative weight < probability value
set pixel as palette[i]Appendix II: Linear RGB Space
Most digital images intended for viewing are generally assumed to be in sRGB colour space, which is gamma-encoded. This means that a linear increase of value in colour space does not correspond to a linear increase in actual physical light intensity, instead following more of a curve. If we want to mathematically operate on colour values in a physically accurate way, we must first convert them to linear space by applying gamma decompression. After processing, gamma compression should be reapplied before display. The following C code demonstrates how to do so following the sRGB standard:
void srgb_to_linear(float pixel[3])
{
pixel[0] = pixel[0] > 0.04045f ? powf((pixel[0] + 0.055f) / 1.055f, 2.4f) : pixel[0] / 12.92f;
pixel[1] = pixel[1] > 0.04045f ? powf((pixel[1] + 0.055f) / 1.055f, 2.4f) : pixel[1] / 12.92f;
pixel[2] = pixel[2] > 0.04045f ? powf((pixel[2] + 0.055f) / 1.055f, 2.4f) : pixel[2] / 12.92f;
}
void linear_to_srgb(float pixel[3])
{
pixel[0] = pixel[0] > 0.0031308f ? 1.055f * powf(pixel[0], 1.0f / 2.4f) - 0.055f : 12.92f * pixel[0];
pixel[1] = pixel[1] > 0.0031308f ? 1.055f * powf(pixel[1], 1.0f / 2.4f) - 0.055f : 12.92f * pixel[1];
pixel[2] = pixel[2] > 0.0031308f ? 1.055f * powf(pixel[2], 1.0f / 2.4f) - 0.055f : 12.92f * pixel[2];
}
Appendix III: Threshold Matrices and Noise Functions
All of the examples demonstrating ordered dithering so far have been produced using a specific type of threshold matrix commonly known as a Bayer matrix. In theory however any matrix could be used and a number of alternatives are available depending on your qualitative preference. Matrices also don’t have to be square or even rectangular; polyomino-based dithering matrices have been explored as well[6].
The classic Bayer or ‘dispersed-dot’ pattern arranges threshold values in an attempt to optimise information transfer and minimise noise[7]. The matrix dimensions are typically a power of two. The following values describe an 8×8 matrix:
int bayer_matrix[8][8] = {
{ 0, 32, 8, 40, 2, 34, 10, 42 },
{ 48, 16, 56, 24, 50, 18, 58, 26 },
{ 12, 44, 4, 36, 14, 46, 6, 38 },
{ 60, 28, 52, 20, 62, 30, 54, 22 },
{ 3, 35, 11, 43, 1, 33, 9, 41 },
{ 51, 19, 59, 27, 49, 17, 57, 25 },
{ 15, 47, 7, 39, 13, 45, 5, 37 },
{ 63, 31, 55, 23, 61, 29, 53, 21 } };
The halftone or ‘clustered-dot’ matrix uses a dot pattern reminiscent of traditional photographic halftoning. Here a diagonal variant of the pattern is given:
int halftone_matrix[8][8] = {
{ 24, 10, 12, 26, 35, 47, 49, 37 },
{ 8, 0, 2, 14, 45, 59, 61, 51 },
{ 22, 6, 4, 16, 43, 57, 63, 53 },
{ 30, 20, 18, 28, 33, 41, 55, 39 },
{ 34, 46, 48, 36, 25, 11, 13, 27 },
{ 44, 58, 60, 50, 9, 1, 3, 15 },
{ 42, 56, 62, 52, 23, 7, 5, 17 },
{ 32, 40, 54, 38, 31, 21, 19, 29 } };
The blue noise or ‘void-and-cluster’ dither pattern avoids directional artefacts while retaining the optimal qualities of the Bayer pattern. The Bayer matrix can in fact be derived from the void-and-cluster generation algorithm itself[8].
You can access some tiled blue noise textures in plain text format here. I have also released a small C library for generating these textures.
It’s also possible to abandon the threshold matrix altogether and instead calculate a value for every pixel coordinate at runtime. If the function is simple enough this can be a good and efficient way to break up patterns and create interesting textures.
White noise simply uses a random number generator to produce threshold values.
float white_noise(int x, int y)
{
return (float)rand() / RAND_MAX;
}
Interleaved gradient noise is a form of low-discrepancy sequence that attempts to distribute values more evenly across space when compared to pure white noise[9].
float interleaved_gradient_noise(int x, int y)
{
return fmodf(52.9829189f * fmodf(0.06711056f * (float)x + 0.00583715f * (float)y, 1.0f), 1.0f);
}
The R-sequence is another type of low-discrepancy sequence based on specially chosen irrational numbers[10]. It is similar to interleaved gradient noise but is simpler to compute and possibly more effective as a dither, particularly when augmented with a triangle wave function as demonstrated:
float r_sequence(int x, int y)
{
float value = fmodf(0.7548776662f * (float)x + 0.56984029f * (float)y, 1.0f);
return value < 0.5f ? 2.0f * value : 2.0f - 2.0f * value;
}
Footnotes
1 It’s also possible to use 4 candidates per pixel and compute the barycentric coordinates of the resulting tetrahedron, but using 3 candidates forming a triangle is more straightforward. ↑
2 For points outside the convex hull, an acceptable solution is to find the closest point on the surface and determine the barycentric coordinates for that point instead. ↑
3 Strictly speaking, the slope is continuous everywhere except for the data points themselves. ↑
4 A good discussion on luminance and how to calculate it can be found on this stack exchange question. ↑
References
[1] K. Lemström, J. Tarhio & T. Takala: “Color Dithering with n-Best Algorithm” (1996). ↑
[2] K. Lemström & P. Fränti: “N-Candidate methods for location invariant dithering of color images” (2000). ↑
[3] T. Knoll: “Pattern Dithering” (1999). US Patent No. 6,606,166. ↑
[4] M. Sambridge, J. Braunl & H. McQueen: “Geophysical parametrization and interpolation of irregular data using natural neighbours” (1995). ↑
[5] L. Liang & D. Hale: “A stable and fast implementation of natural neighbour
interpolation” (2010). ↑
[6] D. Vanderhaeghe & V. Ostromoukhov: “Polyomino-Based Digital Halftoning” (2008). ↑
[7] B. E. Bayer: “An optimum method for two-level rendition of continuous-tone pictures” (1973). ↑
[8] R. Ulichney: “The void-and-cluster method for dither array generation” (1993). ↑
[9] J. Jimenez: “Next Generation Post Processing in Call of Duty: Advanced Warfare” (2014). ↑
[10] M. Roberts: “The Unreasonable Effectiveness of Quasirandom Sequences” (2018). ↑
